HapTex: A Database of Fabric Textures for Surface Tactile Display
Jian Jiao , State Key Lab of Virtual Reality Technology and Systems, Beihang University, jiaojian2jiaojian@163.com
Yuru Zhang , State Key Lab of Virtual Reality Technology and Systems, Beihang University, yuru@buaa.edu.cn
Dangxiao Wang, State Key Lab of Virtual Reality Technology and Systems, Beihang University, hapticwang@buaa.edu.cn
Xingwei Guo , State Key Lab of Virtual Reality Technology and Systems, Beihang University, guoxingwei09@foxmail.com
Xiaoying Sun , College of Communication Engineering, Jilin University, sunxy@jlu.edu.cn
Overview
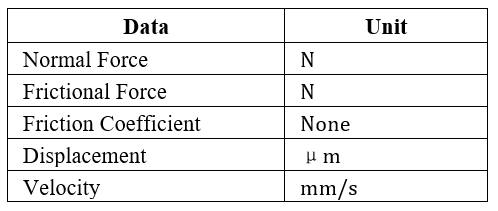
In this work, we introduce a haptic texture database of fabrics defined by friction force during the interaction between bare-finger and real-fabric. The database includes the friction force, the normal force applied by the fingertip, friction coefficient, displacement and velocity of the fingertip. These data were acquired when sliding a fingertip across 120 kinds of fabrics. We illustrate the application of the database through one example of haptic texture modeling and rendering, which allows users to feel virtual haptic texture on an electrostatic tactile display. In the end, we envision and exploit several potential applications for the database. The database is available online for free access and use by the research community.

Figure 1. 120 kinds of fabrics for the establishment of tactile texture database.
 |
 |
|
(a) Whole schematic design of the measurement system |
(b) Physical prototype of the measurement system. |
Figure 2. Force and displacement measurement system.
 |
 |
|
(a) Full view of measurement. |
(b) Posture of fingertip scanning across a fabric surface. |
Figure 3. Force and displacement measurement of finger moving on fabric surface.
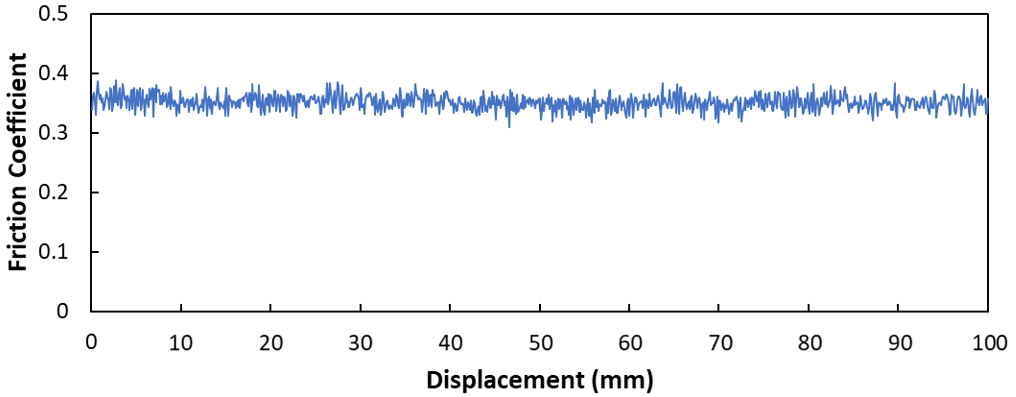
Figure 4. A recorded friction coefficient data for a fabric sample.
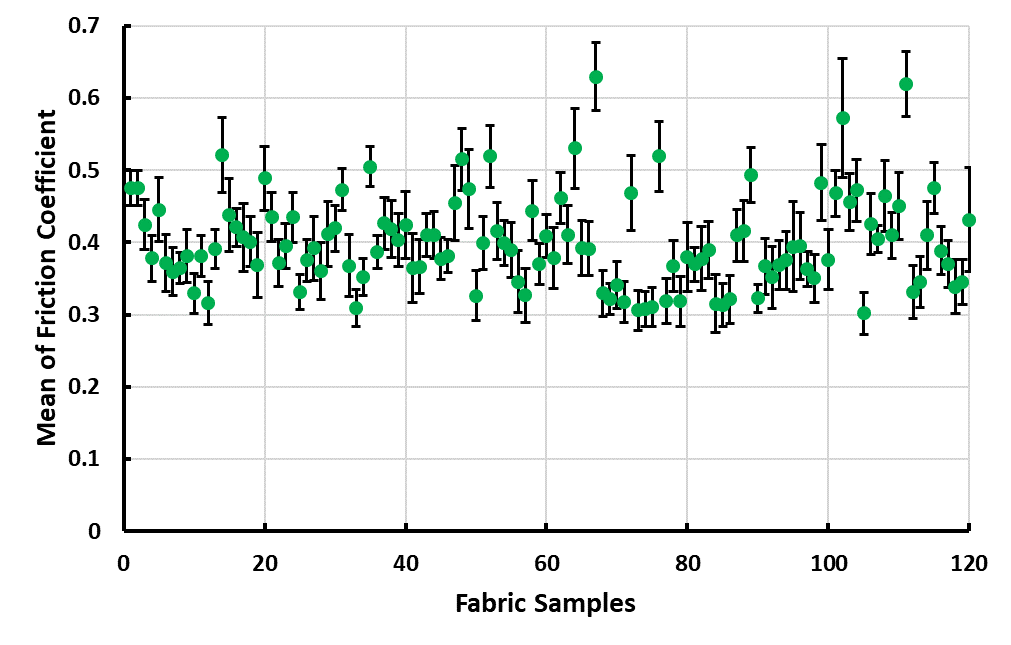
Figure 5. Distribution of friction coefficients for 120 fabric samples.
 |
 |
|
(a) Full view of test. |
(b) Detailed view of experiencing a virtual tactile texture. |
Figure 6. The electrostatic tactile display device used in this work.
TABLE I. DATA FOR EACH FABRIC STORED IN FILES.
Download: FabricPicture.rar
Download: FrictionDisplacement.rar